https://heihei12305.github.io/MOPSO/
1.0 版本 pso 部分
      最近做大创开始学习遗传算法,粒子群算法等,在大佬的带领下,开始写点博客,因为是第一次写,而且自己学的也不好(捏个是重点),就当写给自己看啦。
      粒子群算法跟遗传算法一样,都是从自然界的自然现象得到启发,而被大牛创造出来的,在一代代的改进中逐渐趋于完善,也慢慢作用于越来越多的领域中。
      粒子群算法据说是从鸟群寻食中得到的启发,一群鸟在一个不知道食物分布的地方觅食,它们会渐渐集中到食物最多的地方去,当然,如果地方太大的话,也可能会出现多个集中鸟比较多的地方。<font color=#0099ff size=5 face="STCAIYUN">这里头有几个官方术语</font>
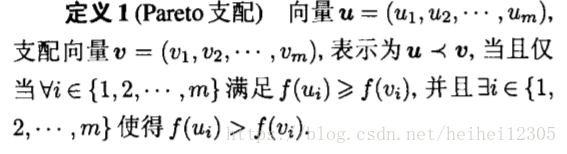
      个人理解就是一个较优解集支配一个次优解集

      Pareto最优就是在最理想条件下,我们取得了自己最想要的结果,但是很遗憾,因为现实问题的影响因素太多,所以我们往往陷入局部最优,或者得到一堆 较优解。于是:

      根据我们计算得到的最优解集,我们可以计算出理想的最终优化结果,就像如果发电的模型的话,我们可以得到我们想要的发电的效率啦,参量啦~~~也就是

      下面的是一个在matlab上已经测试通过的 z = x^2 + y^2的pso实现全部代码,希望对大家有帮助。
下文代码参考该博主代码写出,这个博客讲PSO很赞哎!
https://blog.csdn.net/zyqblog/article/details/80829043
close all;
clc;
N = 100;%种群规模
D = 2;%粒子维度
T = 100;%迭代次数
Xmax = 2000;
Xmin = -2000;
c1 = 1.5; %学习因子1
c2 = 1.5; %学习因子2
w = 0.8; %惯性权重
Vmax = 10; % 最大飞行速度
Vmin = -10;% 最小飞行速度
popx = rand(N,D)*(Xmax-Xmin)+Xmin;% 初试化粒子群的位置(粒子位置是个D维向量)
popv = rand(N,D)*(Vmax-Vmin)+Vmin;%初始化粒子群的速度(粒子速度是个D维向量)
%初始化每个历史最优粒子
pBest = popx;
pBestValue = func_fitness(pBest);
%初始化全局历史最优粒子
[gBestValue,index] = max(func_fitness(popx));
gBest = popx(index,:);
for t=1:T
for i=1:N
%更新个体的位置和速度
popv(i,:) = w*popv(i,:)+C1*rand*(pBest(i,:)-popx(i,:))+C2*rand*(gBest-popx(i,:));
popx(i,:) = popx(i,:)+popv(i,:);
%边界处理,超过定义域范围就取该范围极值
index = popv(i,:)>Vmax | popv(i,:)<Vmin ;
popv(i,index) = rand*(Vmax-Vmin)+Vmin ;
index = find(popx(i,:)>Xmax | popx(i,:)<Xmin);
popx(i,index) = rand*(Xmax-Xmin) + Xmin;
%更新粒子历史最优
if func_fitness(popx(i,:))>pBestValue(i)
pBest(i,:) = popx(i,:);
pBestValue(i) = func_fitness(popx(i,:));
elseif pBestValue(i)>gBestValue
gBest = pBest(i,:);
gBestValue = pBestValue(i);
end
end
%每代最优解对应的目标函数值
tBest(t) = func_objValue(gBest);%目标函数
end
figure
plot(tBest);
xlabel('迭代次数');
ylabel('适应度值');
title('适应度·进化曲线');
function [result] = func_fitness(pop)
%UNTITLED2 此处显示有关此函数的摘要
% 此处显示详细说明
objValue = func_objValue(pop);
result = 1314 -objValue ;
end
function [result] = func_objValue(pop)
%NTITLED3 此处显示有关此函数的摘要
% 此处显示详细说明
objValue = sum(pop,2);
result = objValue;
end
2.0版,MOPSO部分,文件在这 main.m
@TOC
决定走前端这条路了,不过MOPSO我还是有研究了很久的,大概因为是本科实力不够吧,创新无力,所以只能做到复现,就到这吧,留下这篇文章,后来者少踩点坑吧。
看到MOPSO了,想必已经了解了PSO了,不需要要再赘述这些是什么了。
介绍下 下面的MOPSO文件吧
- 里面有一个电厂约束函数的参数
Varin = load('mydata.mat');%导入了约束函数的参数,以及一个电厂的约束函数,不过一般用ZDT 1,2,3就够了。 ``` function fv = fitness2(x,~,Varin) res1=0; res2=0; for i=1:6 res1 = res1+Varin.a(i)x(i)x(i)+Varin.b(i)x(i)+Varin.c(i); res2 = res2+Varin.Ea(i)x(i)x(i)+Varin.Eb(i)x(i)+Varin.Ec(i)+Varin.Ed(i)exp(Varin.Ee(i)x(i)); end fv(1) = res1; fv(2) = res2;
end
2. 参看论文有改过几个地方,不过个人感觉不重要。关键点在p189行那, 毫无疑问,这是一种取巧做法,是不可取的,但实在是创新无力,参考ZDT函数特性改的,做法很不可取,读者要是用这个代码,心里有点数哈~~~
if x(i,j)<Varin.pMin(j)
if(randi([0,0],1)==0)
x(i,j)=Varin.pMin(j);
v(i,j)=-v(i,j)unifit;
if(unifit>0.2)
unifit = unifit -0.1;
end
else
x(i,j)=Varin.pMin(j)+(Varin.pMax(j)-Varin.pMin(j))rand; %随机初始化位置
v(i,j)=(Varin.pMax(j)-Varin.pMin(j))rand0.5;
end
end
3. 这个代码跑的奇慢无比其他的倒都是正常的MOPSO代码了,嘿嘿,我就到这了,要加油丫。
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % 改进的多目标粒子群算法,包括多个测试函数 % 对程序中的部分参数进行修改将更好地求解某些函数 %% 主函数 function []=main() Varin = load(‘mydata.mat’);%导入了约束函数的参数 ZDTFV=cell(1,50); %// 创建元胞数组 ZDT=zeros(1,50); %//0矩阵 funcname = ‘ZDT1’; times = 10;%相当于独立运行十次程序 M = 100;%MOPSO中的迭代次数 for i=1:times %//循环10次,做以下的迭代 tic; %//计时开始 %[np,nprule,dnp,fv,goals,pbest]=ParticleSwarmOpt(funcname,100,200,2.0,1.0,0.5,M,30,Varin);%–ZDT3 zeros(1,9)-5-》zeros(1,29) [np,nprule,dnp,fv,goals,pbest]=ParticleSwarmOpt(funcname,100,200,2.0,1.0,0.4,M,10,[0,zeros(1,9)],[1,zeros(1,9)+5],Varin);%–ZDT4 elapsedTime=toc; %//计时结束 ZDTFV(i)={fv}; ZDT(i)=elapsedTime; display(strcat(‘迭代次数为’,num2str(i))); end zdt1fv=cell2mat(ZDTFV’); for i =1:times display(strcat(i,’:’)); disp(ZDT(i));%也就是用时啦 end disp(zdt1fv); disp(‘接下来,更新后的适应度值为:’); zdt1fv=GetLeastFunctionValue(zdt1fv); disp(zdt1fv); figure(9) plot(zdt1fv(:,1),zdt1fv(:,2),’k*’); %以下设置坐标轴的字体形式和大小 xlabel(‘$f_1$’,’interpreter’,’latex’,’FontSize’,25); ylabel(‘$f_2$’,’interpreter’,’latex’,’FontSize’,25); set(gca,’FontName’,’Times New Roman’,’FontSize’,25)%设置坐标轴字体和刻度的大小,get current axes返回当前坐标轴对象的句柄值 %if(strcmp(funcname,’ZDT3’)) axis([0 1 0 1]); %else % axis([20555 20790 190.4 190.7]); %end
% 以下求收敛度 % 先均匀取真实Pareto最优解上的点,再求其两目标函数值 p_true=0:0.002:1; pf_true1=p_true; pf_true2=1-p_true.^2; r=size(zdt1fv,1);
for i=1:r%对每一个非劣解, for j=1:501 d(i,j)=sqrt((zdt1fv(i,1)-pf_true1(j))^2+(zdt1fv(i,2)-pf_true2(j))^2); end end %下面对d中每行求最小值,即为第i个点与各点的最小距离 for i=1:r dmin(i)=min(d(i,:)); end Cmean=mean(dmin); %Cfangcha=var(dmin)% 各数与均值的差的平方,除以个数-1,这是样本方差 disp(‘样本均值:’); disp(Cmean); Cvariance=var(dmin,1);% 各数与均值的差的平方,除以个数,这是数学上方差的定义 disp(‘样本方差:’); disp(Cvariance) % 下面求多样性delta % 先对zdt1fv按第一列升序排序,即按横坐标(第一个目标值)从左到右 zdt1fv=sortrows(zdt1fv);%按第一列升序排序结束,下面计算df(与左边的极值解前沿的距离)和dl(与最右边的极值解前沿的距离) df=sqrt((zdt1fv(1,1)-0)^2+(zdt1fv(1,2)-1)^2); r=length(zdt1fv); dl=sqrt((zdt1fv(r,1)-1)^2+(zdt1fv(r,2)-0)^2); for i=1:r-1 %第i个和第i+1个解前沿之间的距离为d(i) c(i)=sqrt((zdt1fv(i,1)-zdt1fv(i+1,1))^2+(zdt1fv(i,2)-zdt1fv(i+1,2))^2); end %下面求d的均值 meanNum=mean(c); %代入公式计算delta的值 %先求和号的部分 sum=0; for i=1:r-1 sum=sum+abs(c(i)-meanNum); end delta=(df+dl+sum)/(df+dl+(r-1)*meanNum); disp(‘多样性为:’); disp(delta);
end %% MOPSO函数定义 %function [np,nprule,dnp,fv,goals,pbest] = ParticleSwarmOpt(funcname,N,Nnp,cmax,cmin,w,M,D,Varin) function [np,nprule,dnp,fv,goals,pbest] = ParticleSwarmOpt(funcname,N,Nnp,cmax,cmin,w,M,D,lb,ub,Varin) %待优化的目标函数:fitness %电厂约束函数:fitness2 %内部种群(粒子数目):N %外部种群(非劣解集):Nnp %适应度参数 %学习因子1:cmax %学习因子2:cmin %惯性权重:w %最大迭代次数:M %问题的维数:D %目标函数取最小值时的自变量值:xm %目标函数的最小值:fv %迭代次数:cv %非劣检查:flag %自适应度参数:unifit:1->0.1
format long; unifit = 1; flag = 0; NP=[];%非劣解集 Dnp=[];%非劣解集距离 params = struct(‘isfmopso’,true,’istargetdis’,false,’stopatborder’,true);%ZTD2->isfmopso(false->true)改了一下 ZTD3问题时应为true %x0=lb+(ub-lb).*rand([1,D]); %T=size(fitness(x0,funcname),2); T = 2; goals=zeros(M,N,T);%记下N个粒子M次迭代T维目标变化
% %—-初始化种群的个体——–///////第1步/////////////////////////////////// % %x(1,:)=x0; % %v(1,:)=(ub-lb).rand([1,D])0.5; x = zeros(N,D); v = zeros(N,D); % for i=1:N % for j=1:D % x(i,j)=lb(j)+(ub(j)-lb(j))rand; %随机初始化位置 % v(i,j)=(ub(j)-lb(j))rand0.5; %随机初始化速度 % end % end % %—-计算目标向量———- % %—速度控制 % %vmax=(ub-lb)0.5; %vmin = -vmax;
%—-初始化种群的个体——–///////第1步///////////////////////////////////
for i=1:N for j=1:D x(i,j)=lb(j)+(ub(j)-lb(j))rand; %随机初始化位置 v(i,j)=(ub(j)-lb(j))rand0.5; %随机初始化速度 end end %—-计算目标向量———- %—速度控制 vmax=(ub-lb)0.5; vmin= -vmax;
%—–求出初始NP———–////////第2步/////////////////////////////////// NP(1,:)=x(1,:);%第一个默认加入(非劣解集),粒子为一行不确定列的,列数表示决策变量数,即问题的维数 NPRule=[0,0,0];%非劣解集参数 Dnp(1,1)=0;
for i=2:N
[NP,NPRule,Dnp,flag] = compare(flag,x(i,:),NP,NPRule,Dnp,Nnp,funcname,params,Varin); end %-----初始自身最好位置------///////第3步//////////////////////////////////// pbest = x;%自身最优解
%—–在确定每个粒子所对就的目标方格——-//第4步///////////////////////////
%——进入主要循环,按照公式依次迭代————
for t=1:M
c = cmax - (cmax - cmin)t/M;
w1=w-(w-0.3)t/M;
for i=1:N %-----获得全局最优-------/////第5步/////////////////////////////////////////////
[gbest,NPRule] = GetGlobalBest(NP,NPRule,Dnp);
v(i,:)=w1*v(i,:)+c*rand*(pbest(i,:)-x(i,:))+c*rand*(gbest-x(i,:));
for j=1:D
if v(i,j)>vmax(j)
v(i,j)=vmax(j);
elseif v(i,j)<vmin(j)
v(i,j)=vmin(j);
end
end
x(i,:)=x(i,:)+v(i,:); %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %-------------------采取措施,避免粒子飞出空间----------////第7步/////////////
%速度位置钳制
if(params.stopatborder)%粒子随机停留在边界
if x(i,1)>ub(1)
x(i,1)=ub(1);
v(i,1)=-v(i,1);
end
if x(i,1)<lb(1)
x(i,1)=lb(1)+(ub(1)-lb(1))*rand; %随机初始化位置
v(i,1)=(ub(1)-lb(1))*rand*0.5;
end
for j=2:D
if x(i,j)>ub(j)
if(randi([0,2],1)==0)%改了0->1
x(i,j)=ub(j);
v(i,j)=-v(i,j);
else
x(i,j)=lb(j)+(ub(j)-lb(j))*rand; %随机初始化位置
v(i,j)=(ub(j)-lb(j))*rand*1.5;
end
end
if x(i,j)<lb(j)
if(randi([0,0],1)==0)
x(i,j)=lb(j);
v(i,j)=-v(i,j)*unifit;
if(unifit>0.2)
unifit = unifit -0.1;
end
else
x(i,j)=lb(j)+(ub(j)-lb(j))*rand; %随机初始化位置
v(i,j)=(ub(j)-lb(j))*rand*0.5;
end
end
end
end %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %------------------每个粒子的目标向量-----------------//第8步///////////////
goals(t,i,:)=fitness(x(i,:),funcname,Varin); %----------------调整自身---------------------------//第9步/////////////////
domiRel = DominateRel(pbest(i,:),x(i,:),funcname,params,Varin);%x,y的支配关系
if domiRel==1%pbest支配新解
continue;
else
if domiRel==-1%新解支配pbest
pbest(i,:) = x(i,:);
elseif(rand*2<1)%新解与pbest互相不支配
pbest(i,:) = x(i,:);
end %-----------------对NP进行更新和维护-----------------//第10步////////////////
[NP,NPRule,Dnp,flag] = compare(flag,x(i,:),NP,NPRule,Dnp,Nnp,funcname,params,Varin);
if flag==1%为克服本算法易陷入局部最优的问题,引入非劣排查监测机制
[NP,flag,x,v] = fresh(NP,flag,x,v);
end
end
end end np = NP;%非劣解 nprule=NPRule; dnp = Dnp;%非劣解之间的距离 r=size(np,1); fv=zeros(r,T); for i=1:r
fv(i,:)=fitness(np(i,:),funcname,Varin); end end %%%%%%%%%%%%%%%--------------主函数结束--------------%%%%%%%%%%%%%%%%% %% 将粒子维护到外部种群 function [np_out,nprule_out,dnp_out,flag] = compare(flag,x,np,nprule,dnp,nnp,funcname,params,Varin) %np:现有非劣解 %x:需要比较的量 Nnp = nnp;%非劣解集空间 r=size(np,1);%非劣解的个数 np_out=np;%非劣解复本 nprule_out = nprule; dnp_out = dnp;%非劣解集点之间距离 if r==0
return; end for i=r:-1:1
domiRel=DominateRel(x,np(i,:),funcname,params,Varin);
if domiRel==1 %NP(i)被x支配
np_out(i,:)=[];%非劣解剔除该解
nprule_out(i,:)=[];
dnp_out(i,:)=[];
if ~isempty(dnp_out)
dnp_out(:,i)=[];
end
elseif domiRel==-1 %x被NP(i)支配,返回不再比较
return;
end end r1=size(np_out,1);%现有非劣解的行列 np_out(r1+1,:)=x;%与所有非支配集粒子比较均占优或不可比较,则NP中加入x
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
nprule_out(r1+1,:)=[0,0,0];
if r1==0
dnp_out=0;
end
for j=1:r1
dnp_out(r1+1,j)=GetDistance(np_out(j,:),x,funcname,params);
dnp_out(j,r1+1)=dnp_out(r1+1,j);
end
if r1>=Nnp %达到非劣解种群极限
%———移除密集距离最小的一个——-
densedis = GetDenseDis(dnp_out);
n_min = find(min(densedis)==densedis);%找出密度距离最小的一个
tempIndex = randi([1,length(n_min)],1);
if min(densedis)==0
flag = 1;
end
np_out(n_min(tempIndex),:)=[];%非劣解剔除该解
nprule_out(n_min(tempIndex),:)=[];
dnp_out(n_min(tempIndex),:)=[];
if ~isempty(dnp_out)
dnp_out(:,n_min(tempIndex))=[];
end
end
end
%% 求两向量之间的距离
function dis=GetDistance(x,y,funcname,params)
if(params.istargetdis)
gx=fitness(x,funcname,Varin);
gy=fitness(y,funcname,Varin);
gxy=(gx-gy).^2;
dis=sqrt(sum(gxy(:)));
else
g=x-y;
dis=sum(sum(g.^2));
end
end
%% 密集距离(最近的距离)
function densedis = GetDenseDis(dnp)
[r,c] = size(dnp);
densedis=zeros(1,r);
for i=1:r
firstmin=Inf;
for j=1:c
if dnp(i,j)~=0 && dnp(i,j)<firstmin
firstmin = dnp(i,j);
end
end
densedis(i)=firstmin;
end
end
%% 稀疏距离(第二近的距离)
function sparedis = GetSpareDis(dnp)
[r,c] = size(dnp);
sparedis=zeros(1,r);
for i=1:r
firstmin=Inf;
secondmin=Inf;
for j=1:c
if dnp(i,j)~=0 && dnp(i,j)<firstmin
firstmin = dnp(i,j);
end
if dnp(i,j)~=0 && dnp(i,j)~=firstmin && dnp(i,j)<secondmin
secondmin = dnp(i,j);
end
end
sparedis(i)=(firstmin+secondmin)/2;
end
end
%% 比较两粒子的相互支配关系
function v = DominateRel(x,y,funcname,~,Varin)
%判断x与y支配关系,返回1表示x支配y,返回-1表示y支配x,返回0表示互不支配
v=0;
gx = fitness(x,funcname,Varin);%x的目标向量
gy = fitness(y,funcname,Varin);%y的目标向量
len = length(gx);
if sum(gx<=gy)==len%x的所有目标都比y小,x支配y
v=1;
elseif sum(gx>=gy)==len%y的所有目标都比x小,y支配x
v=-1;
end
end
%% 随机取一个全局最优
function [gbest,nprule_out] = GetGlobalBest(np,nprule,dnp_out)
r=size(np,1);%非劣解的行列
nprule_out=nprule;
intem=1;
if(round(rand)==0)
if r==1
gbest = np(1,:);
else
sparedis = GetSpareDis(dnp_out);
if(round(rand)==0)
n_max=find(max(sparedis)==sparedis);
intem=n_max(round(rand(length(n_max)-1)+1));
gbest = np(intem,:);
else %添加了寻找最小的操作
sparedis = GetSpareDis(dnp_out);
n_min=find(min(sparedis)==sparedis);
intem=n_min(round(rand(length(n_min)-1)+1));
gbest = np(intem,:);
end
end else
tt=find(min(nprule(:,1))==nprule(:,1)); %随机取一个作为全局最优,看曾经被选过的次数最低的优先选
intem=tt(round(rand*(length(tt)-1)+1));
gbest = np(intem,:); end nprule_out(intem,1)=nprule_out(intem,1)+1;%对于选取的粒子,将nprule(行数同np,列数为3)中对应此 %行的第一列的数值加1,因为此列记录粒子被选取过的次数,将来作为是否再次将其选为全局极值的参考。 end %% 电厂约束函数 function fv = fitness2(x,~,Varin)
res1=0;
res2=0;
for i=1:6
res1 = res1+Varin.a(i)*x(i)*x(i)+Varin.b(i)*x(i)+Varin.c(i);
res2 = res2+Varin.Ea(i)*x(i)*x(i)+Varin.Eb(i)*x(i)+Varin.Ec(i)+Varin.Ed(i)*exp(Varin.Ee(i)*x(i));
end
fv(1) = res1;
fv(2) = res2;
end
%% ZDT1,ZDT2,ZDT3测试函数
function fv=fitness(x,funcname,~)
%获得多目标的目标向量 fv
fv=[];
switch upper(funcname)
case ‘ZDT1’
n=length(x);
gv=1+9sum(x(2:n))/(n-1);
fv(1)=x(1);
fv(2)=gv(1-sqrt(x(1)/gv));
case ‘ZDT2’
n=length(x);
gv=1+9sum(x(2:n))/(n-1);
fv(1)=x(1);
fv(2)=gv(1-(x(1)/gv).^2);
case ‘ZDT3’
n=length(x);
gv=1+9sum(x(2:n))/(n-1);
fv(1)=x(1);
fv(2)=gv(1-sqrt(x(1)/gv)-(x(1)/gv)sin(10pix(1)));
case ‘ZDT4’
n=length(x);
gv=1+10(n-1)+sum(x(2:n).^2-10cos(4pix(2:n)));
fv(1)=x(1);
fv(2)=gv(1-sqrt(x(1)./gv));
end
end
%% 剔除外部种群中的非支配集
function fvout=GetLeastFunctionValue(fvin)
fvout=fvin;
n=size(fvout,1);
i=1;
while(i<=n)
j=i+1;
isdominated=false;%判断条件
while(j<=n)
a=fvout(i,:);b=fvout(j,:);
if((a(1)<b(1)&&a(2)<=b(2))||(a(1)<=b(1)&&a(2)<b(2)))%b被a支配了
fvout(j,:)=[];n=n-1;
else
if((b(1)<a(1)&&b(2)<=a(2))||(b(1)<=a(1)&&b(2)<a(2)))%a被b支配了
isdominated=true;
end
j=j+1;
end
end
if isdominated
fvout(i,:)=[];n=n-1;
else
i=i+1;
end
end
end
%% flag为1,说明结果可能陷入局部最优,故加入25%新鲜粒子
function [NP,flag,x,v] = fresh(NP,~,x,v)
r=size(NP,1);
flag =1;
for i=2:r
if(randi([0,3],1)==0)
for j=1:D
x(i,j)=lb(j)+(ub(j)-lb(j))rand; %随机初始化位置
v(i,j)=(ub(j)-lb(j))rand*0.5; %随机初始化速度
end
end
end
end
```